運動学習を2人で行うと上達が早いのは、なぜ?
高木 敦士
2017年3月号掲載
ヒトとヒトとの間では、感覚受容器を介し、さまざまな情報交換がなされている。交換される情報のうち力に着目し、それがヒトの動作や行動に及ぼす影響を研究しているのが、東京工業大学の高木敦士さんたちのグループだ。これまでの研究から、運動学習を行うときに、2人をゴムなどで連結して互いの力を情報交換しながら行わせると、1人で学ぶよりも学習効率が上がるという実験結果が得られている。なぜ学習効率が上がるのだろうか。今回、その仕組みを解析して、コンピューター・シミュレーションによる再現に成功し、Nature Human Behaviour 3月号に発表した。
―― 2人で一緒に運動学習を行うと、早く上達できるのですか。
高木氏: ある同一の運動課題を、2人が同時に行うとします。そのとき、2人をゴムなどの弾性素材で連結して行わせると、1人ずつで行うよりも上達が早いということが、これまでの実験で確認できています。ここでいう運動とは、スポーツという意味ではなく、体を動かすこと全般を指します。動作といった方がわかりやすいかもしれません。
この実験を主導したのは、私のボスだったEtienne Burdet教授(英国インペリアル・カレッジ・ロンドン)とATR脳情報通信総合研究所のGowrishankar Ganesh研究員(現ATR客員研究員・フランス国立科学研究センター[CNRS]主任研究員)です。この結果が得られたことは、2014年にScientific Reports に発表されています1。
私が博士課程の学生としてBurdet研究室に入った2011年当時、すでにこの実験結果が得られており、私は、なぜそうなるのか、この現象の解釈を進めることになりました。
―― 運動課題とは、どのようなものですか。
高木氏: この実験では、コンピューターの画面上をランダムに動き回るターゲットがあり、被験者は、画面上のカーソルを動かしてそのターゲットを追う、というのが運動課題でした(図1)。カーソルは、通常のマウスではなく、特殊なハンドルによって操作するようにしてあります。被験者はこのハンドルを手で握ってカーソルを動かすので、手の運動ということになりますね。ターゲットの動きはランダムなので、追いかけるのは決して簡単ではありません。
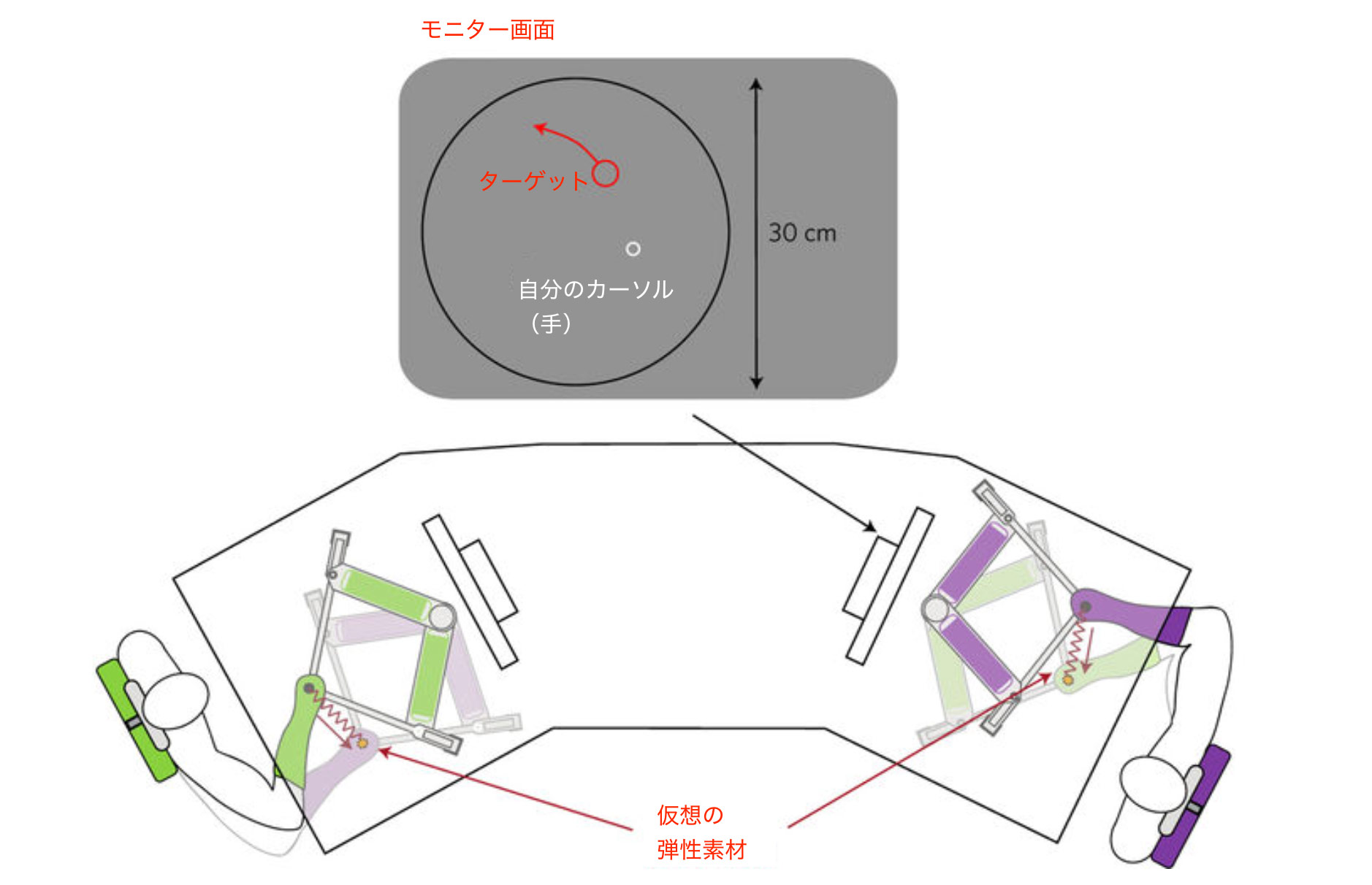
実際には、2人の被験者の間は仕切られていて、互いが見えない。被験者は仮想的なゴムで連結されている。例えば、緑色の被験者は、紫色の被験者の力を手(ハンドル)に感じる。その力は、2人の手の位置の違いをもとに計算する。それぞれのモニター画面にはターゲット(赤色)とカーソル(白色)が表示されている。 | 拡大する
―― 2人の被験者の連結は、どのようにするのですか。
高木氏: 実験装置を2セット用意します。2人の被験者がそれぞれの画面に向かって座り、ハンドルを操作してターゲットを追うのですが、このとき、2人の手を、ゴムのような弾性素材で連結すると想像してください。弾性素材での連結ですから、被験者は相手からの力を感じつつも、自分の手をある程度自由に動かすことができます。
ただし、本当に弾性素材でつなぎ合わせるのではありません。実験では、連結と非連結の状態を瞬時に切り替えるなどの必要があるため、弾性素材で連結したときにかかるのと同等の力をモーターで作り出し、それぞれの被験者の手(ハンドル)に伝えるような仕組みにしています。力の大きさと方向は、両被験者の手先の位置を計測して、その位置の変化にバネ定数をかけることにより算出します。
もう1つ大事なのは、2人の被験者の間には目隠しとなる仕切りが置かれ、互いが連結されていることは知らされないということです。したがって、2人の間の心理的な相互作用は排除されています。「手先に力がかかることがある」と被験者には伝えておくのですが、連結に気がつく人はいませんでした。
―― 2人の被験者は、同じターゲットを追うのですか。
高木氏: そうです。ターゲットは同じ動きをするように設定しておきます。2人の被験者はそれぞれに、共通の目的に向かって手の運動を行うことになります。
不思議なことに、たとえ相手の被験者が自分より下手であっても、自分1人でターゲットを追うよりも上達が早くなることがわかっています。2人が同じ目標に向かって操作しているときには、相手のレベルに関係なく上達するのです。
モデルによるシミュレーションへ
―― 2014年に発表した実験結果について、その現象の解釈に成功し、今回、Nature Human Behaviour に発表されたのですね。
高木氏: はい。私は、2014年の実験結果発表後もその解釈に関して研究を続け、モデル作りを行ってきました。そして、実験結果のシミュレーションにようやく成功し、Nature Human Behaviour に発表することができたのです。
私たちの研究分野、計算神経科学では、人間の動作や運動に関して実験を行って、その実験結果を再現できるようなモデルシステムをコンピューター上で作ること、つまりシミュレーションできることが、その動作や運動の解釈に成功したことになります。
―― モデル作りに当たって、考えをどのように進めてこられましたか。
高木氏: 相手の手の動きは、力の大きさ、方向、加速度などとして知覚されます。この伝わってくる力の情報から何らかの有用な情報を得て、自分の手の動きに反映しているのだろうということはすぐに想像されます。しかし、これらをどのようにシミュレーションしたらいいのか、いろいろと考えましたがうまくいかず、結局、数年かかってしまいました。
モデルに組み込む要素として、重要だと気がついたことは、ターゲットが常に動いているので、被験者はそれがどう動くかの予測を行っているという点です。
―― これらの要素を組み込んで、最終的にどのようなモデルになったのでしょうか。
高木氏: 今回の論文で提案したモデルは、次のようなものです。被験者は、ターゲットを見ることから得られる視覚情報をもとに、ターゲットの動く位置を自ら予測します。同時に、自分の手に伝わる相手の力の情報から、相手がカーソルを動かしたい位置、つまり相手のターゲットを予測します。そして、情報として優れている方に重みをつけた上で、両者の平均をとってターゲットの追尾に用いるというモデルです。要するに、相手の手の動きの情報が役立ちそうなら、それを利用しているということです。自分より下手な人であっても、役に立ちそうな情報が少しはあり、それを利用するのでしょう。このようなモデルによって、初めて実験結果を説明することができました。
―― 論文では4つのモデルについてシミュレーションしていますね。
高木氏: はい。私たちの提案したモデルの他に、既存の考え方に基づく3つのモデル(図2)によるシミュレーション結果を検証しました。1つ目はゴムの反動の影響が作用しているとするモデル、2つ目は相手のカーソルの位置に完全に従うという心理学でよく用いられるモデル、3つ目は視覚情報と相手の手の位置との平均をとるという神経科学でよく使われるモデルです。
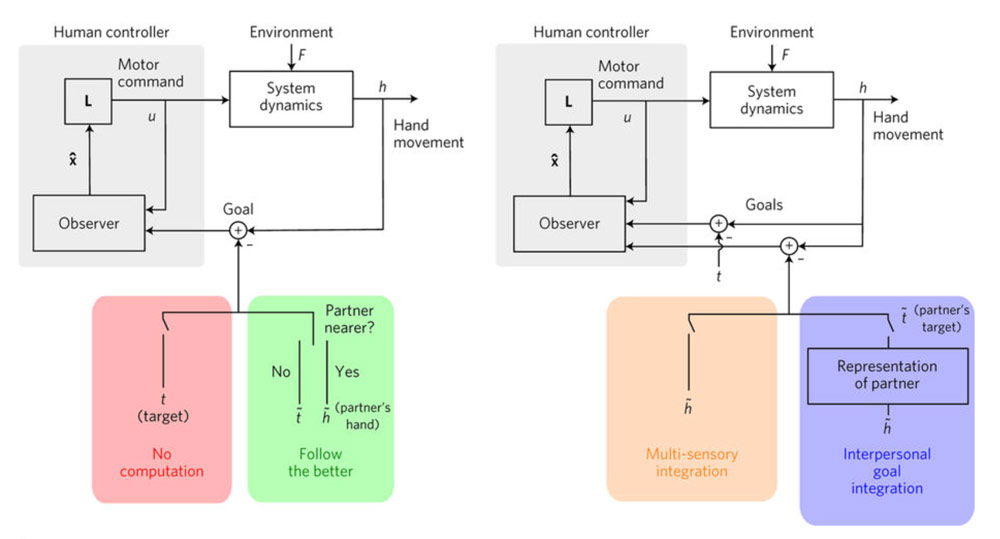
高木さんが提案したモデル(青色)を既存のモデルと比較した。既存のモデルは、ゴムの反動の影響が作用しているとするモデル(ピンク色)、相手のカーソルの位置に完全に従うという心理学でよく用いられるモデル(緑色)、視覚情報と相手の手の位置との平均をとるという神経科学でよく使われるモデル(黄色)、である。 | 拡大する
これら4つのモデルによるシミュレーション結果を、2014年の論文の実験結果と比較しました。その結果、私の提案したモデル以外は、実験結果をシミュレーションできないことが証明できました(図3)。
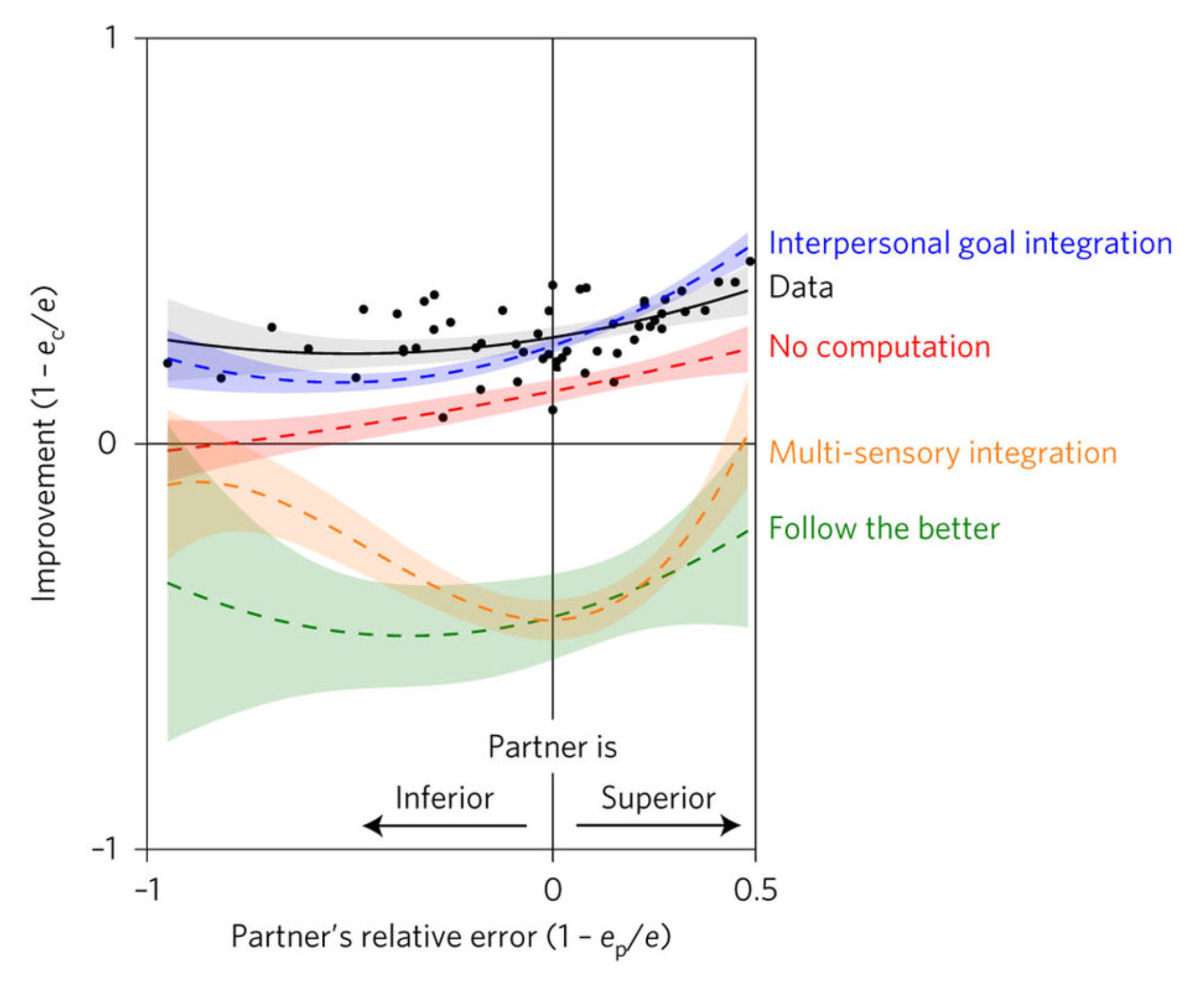
図2のモデルの色と対応する。実際の実験結果(黒色のプロット)に最も近いのは、今回のモデル(青色)である。 | 拡大する
なお、この実験は、共同研究者の川人光男(かわとみつお)さんが所長を務めるATR脳情報通信総合研究所で実施しています。実験装置の組み立てや実験時の操作は、同研究所主任研究技術員の吉岡利福(よしおかとしのり)さんが担当してくださいました(図4)。

被験者間の仕切りは取り外してある。 | 拡大する
―― 被験者は別な人と連結されていることを知らないのに、どうして情報の予測や選択などができるのでしょうか。
高木氏: おそらく無意識のうちに情報が処理されていると考えられます。ヒトは自分の周囲から情報を集め、自己の運動課題のために有益な情報があればそれを使用するということを、特に意識することなく常に行っているのでしょう。
ヒトが力を感じる際には、触覚(体が受ける接触や圧力や動きなどの感覚)と固有感覚(四肢や頭部などの姿勢や動きを認識する感覚)という2つの感覚が働きます。触覚や固有感覚として力が受容され、その情報をもとに相手の動きを推定し、それを自分の動きの修正に用いるという反応が、体によって瞬時に、しかも無意識のうちに行われていたということです。
ロボットを作る
―― 今回の研究では、パートナーの被験者をロボットに代用させることも行ったのですね。
高木氏: そうなのです。今回提案したモデルシステムを組み込んだロボットを作り、このロボットが運動課題を行えるように設計しました。ロボットといっても、ヒトの形をしているわけではなく、コンピューターのシステムとして設計したのですが、それでも苦労しました。また、運動課題を行う器用さに、器用、普通程度、不器用の3段階のバリエーションを持たせようとしたので、それも大変でした。
このロボットと被験者の組み合わせで運動課題を行っても、被験者の上達がみられたことから、モデルの正しさが証明されたと考えています。
―― 今回の研究をどんなことに応用しようと考えていらっしゃいますか。
高木氏: 応用範囲は広いと思います。私とBurdet研究室では、ロボットに応用し、ヒトの動作を補助できるようなロボットが作れるように、基礎技術を開発しようと考えています。
それというのも、今回のモデルは、「相互作用し合うパートナーの力を触覚や固有感覚として知覚して、パートナーの動きを推定し、その推定を自己の動作の修正に利用した」と、とらえることができるからです。これをロボットと人のペアに置き換えれば、人を補助したり、介助したりするロボットの設計に大変役に立つと思われます。
ロボット工学では、ヒトの触覚と固有感覚で知覚される感覚、すなわち接触、力(大きさや方向)、体の位置などの感覚(haptic senseと呼ぶ)の研究が、大変重要です。例えば、手の柔らかな動きができるロボットの開発などで不可欠だからです。私も、ヒトとヒトとの相互作用において、この感覚がどのように作用しているのか研究を行ってきており、ヒトについての理解を深めるだけでなく、ヒトとロボットの相互作用を設計する上で役立たせたいと考えています。
―― ロボットへの応用は、具体的にどのような展開していく計画ですか。
高木氏: 今は、手の動きについてのみのモデルですが、スペインの共同研究者は、このモデルを応用して足首のモデルに使えないか検証を始めています。体のいろいろな部分についてシミュレーションできれば、いろいろな動きに対応できるロボットとなるでしょう。
エクソスケレトン(外骨格型)と呼ばれる装着可能なロボットが、すでにいくつかの企業で開発されていますが、それに応用すればとても優秀なロボットになるでしょう。例えば腕をうまく動かせない人が装着すれば、ヒトが動かしたい腕の動作を瞬時に予測し、それを補助する。ヒトの動きに問題があって何かにぶつかりそうになったら、それを判断してストップをかける。ロボットが予測を誤ったときは、ヒトの動きによりすぐにそれが修正できる。こういった動作の補助が、言葉を介した説明やボタン操作などなしに行えるようになるでしょう。
―― 今回の研究は、Nature Human Behaviour に発表されましたが、どのような経緯でこのジャーナルを選ばれたのですか。
高木氏: 新しいジャーナルが出るということで、Burdet研究室で話題になっていました。Burdet教授が「じゃあ、どんなジャーナルか見てみよう」と言い出し、このジャーナルに出すことを決めたのです。その過程は幸いスムーズに運び、掲載が決まったときは、教授がパーティをしようと言ってくれました。
Burdet研究室はロボット工学の研究分野に属し、ロボットの技術を生物学的な側面から研究しています。そして、私自身の専門は計算神経科学ですから、このジャーナルはうってつけなのです。このようなジャーナルが創刊され、大変喜んでいます。
―― インペリアル・カレッジ・ロンドンで大学院を修了され、2017年4月より東工大にやってこられました。
高木氏: 両親は大阪生まれですが、私はヨーロッパで育ちました。日本は、神経計算機科学の分野で世界のリーダーということもあって、大変興味を持っていました。そうしたところ、昨年、インペリアル・カレッジ・ロンドンと東工大の間で共同プロジェクトがあって、東工大を訪れる機会がありました。そして、この小池康晴研究室が気に入って、移ることにしたのです。
今後は、今回の研究を継続するとともに、新しいことを始めるつもりです。何を始めるかは、今、わくわくしながら考えています。
―― ありがとうございました。
参考文献
- Ganesh G, Takagi A, Osu R, Yoshioka T, Kawato M, Burdet E. Two is better than one: physical interactions improve motor performance in humans. Sci Rep. 4 3824 (2014)
インタビューを終えて
英国のインペリアル・カレッジ・ロンドンから東京工業大学に着任してまだまもない時期に、研究室に伺った。流ちょうな日本語を話されるが、「わからない言葉も多いんですよ。この前もクレジットカードで支払いをしたときに、”一括払い”にしますか”分割払い”にしますかと聞かれて、よくわからず戸惑ってしまいました」と高木さん。私が、「英語で聞き返せばよかったのに。日本人は英語を話す人に親切ですよ」と言うと、「いえいえ、それはだめです。日本にいるのですから、きちんと日本語で答えたいのです」。日本に溶け込み、研究生活をこの地で続けようとする高木さんの決意とその誠実な人柄が、垣間見えた気がする。
聞き手は、藤川良子(サイエンスライター)。
Nature Human Behaviour 掲載論文
Letter: 身体的相互作用をするパートナーは相手の運動の目的を推定してその運動を促す
Physically interacting individuals estimate the partner’s goal to enhance their movements
Nature Human Behaviour 1 : 0054 doi:10.1038/s41562-016-0054 | Published online 6 March 2017
Author Profile
高木 敦士(たかぎ あつし)
東京工業大学科学技術創成研究院バイオインタフェース研究ユニット 特任助教
| 2011年 | 英国インペリアル・カレッジ・ロンドン理学部物理学科 学部修士一貫プログラム修了 |
| 2016年 | 英国インペリアル・カレッジ・ロンドン工学部生物工学科ヒューマンロボティクス(Etienne Burdet研究室) 博士課程修了(Ph.D.) |
| 2016年 | 英国インペリアル・カレッジ・ロンドン工学部生物工学科ヒューマンロボティクス(Etienne Burdet研究室) 博士研究員(Research Associate) |
| 2017年 | 東京工業大学科学技術創成研究院バイオインタフェース研究ユニット 特任助教(現職) |
